project: Ontwerp van een vierassige SCARA-robot
Dit project beschrijft het ontwerp van een vierassige SCARA-robot. SCARA staat hierbij voor Selective Compliance Assembly Robot Arm. Dit type robot wordt in de industrie veel gebruikt voor pick-and-place toepassingen. Een professionele SCARA-robot is hieronder te zien.

|
|
Een professionele SCARA-robot kost echter makkelijk 12 000 euro wat buiten het budget ligt van veel scholen.
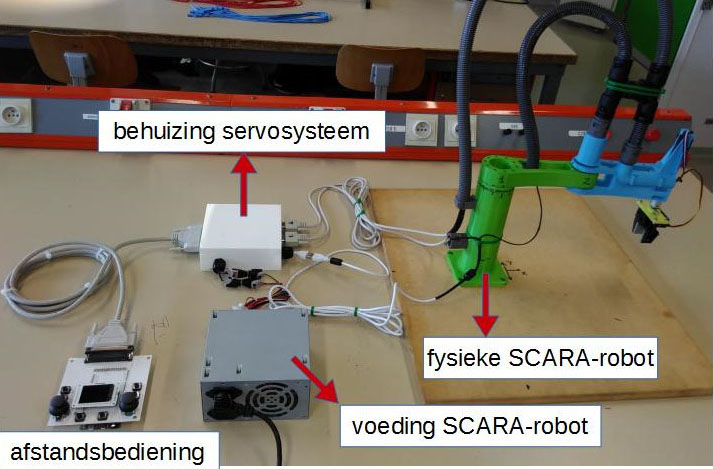
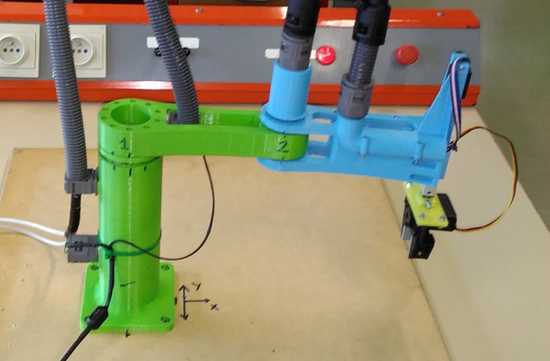
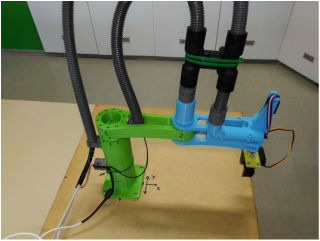
Daarom ben ik samen met een collega een project gestart waarbij wij zelf een SCARA-robot maken met behulp van een 3D-printer. Deze SCARA-robot is hieronder te zien.
Daarom ben ik samen met een collega een project gestart waarbij wij zelf een SCARA-robot maken met behulp van een 3D-printer. Deze SCARA-robot is hieronder te zien.
|
|
|
De SCARA-robot wordt bediend door middel van een afstandsbediening waarbij een arduino due als controller wordt gebruikt. De prijs ligt ligt rond de 1000 euro. Het doel van deze pagina is dan ook deze SCARA-robot kort te omschrijven en alle nodige gegevens te delen zodat geïnteresseerden deze robot kunnen bouwen. Opgelet, de beschrijving hieronder is geen detailbeschrijving. Maar ik vermoed dat iemand met de nodige technische kennis op basis van onderstaande de SCARA-robot kan bouwen en sturen. Je mag bij onduidelijkheden mij altijd contacteren via de pagina "contact".
Hieronder worden volgende delen besproken:
Hieronder worden volgende delen besproken:
- het mechanisch ontwerp van de SCARA-robot
- de elektrische bekabeling van de SCARA-robot
- het elektrisch ontwerp van de afstandsbediening van de SCARA-robot
- de beschrijving en behuizing van het servosysteem van de SCARA-robot
- instellen van het servosysteem voor as 1 en 2
- mogelijke oplossing voor encoderverstoring
1. het mechanisch ontwerp van de SCARA-robot
De robot is getekend in inventor waarbij vertrokken wordt van twee Maxon DC-motoren met encoder (zie de map "info motoren" op google drive voor meer info), een lineaire actuator en een kleine grijper. De robot kan naar verschillende posities worden gestuurd op basis van digitale 3,3V signalen afkomstig van een PLC. Dit is ook te zien in de voorgaande video.
De SCARA-robot bestaat zes grote 3D-geprinte stukken die te vinden zijn in de map "STL-bestanden SCARA-robot" op google drive:
- SCARA-robot deel 1.stl - printen met 20% vulling
- SCARA-robot deel 2.stl - printen met 100% vulling
- SCARA-robot deel 3.stl - printen met 20% vulling
- SCARA-robot deel 4.stl - printen met 20% vulling
- SCARA-robot deel 5.stl - printen met 20% vulling
- SCARA-robot deel 6.stl - printen met 20% vulling
- koppelstuk grijper - printen met 100% vulling
- motorkoppeling.ipt
Hieronder wordt in stappen getoond hoe de onderdelen in elkaar passen.

stap 1: voet SCARA-robot

stap 3: SCARA-robot deel 2 plaatsen. Vergeet niet in de gaten een M3-draad te tappen
|

stap 1: voet SCARA-robot (detail)

stap 3: SCARA-robot deel 2 plaatsen (detail)
|

stap 2: motorkoppeling plaatsen
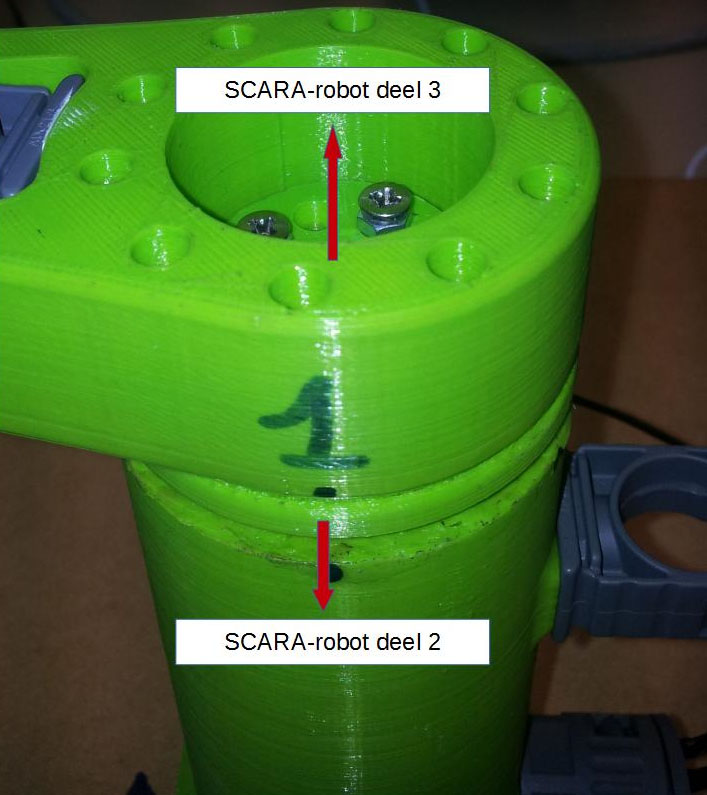
stap 4: SCARA-robot deel 3 koppelen op SCARA-robot deel 2 met 10 bouten M3x8
|
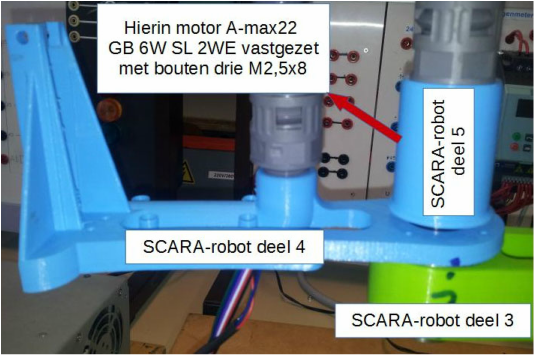
stap 5: SCARA-robot deel 4 koppelen aan SCARA-robot deel 3
|
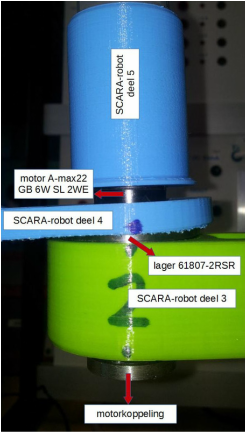
stap 5: SCARA-robot deel 4 koppelen aan SCARA-robot deel 3 (detail)
|
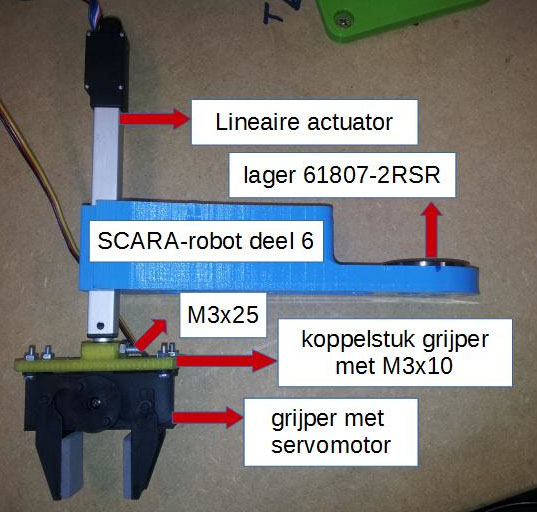
stap 6: plaatsen van grijper en actuator in SCARA-robot deel 6
|
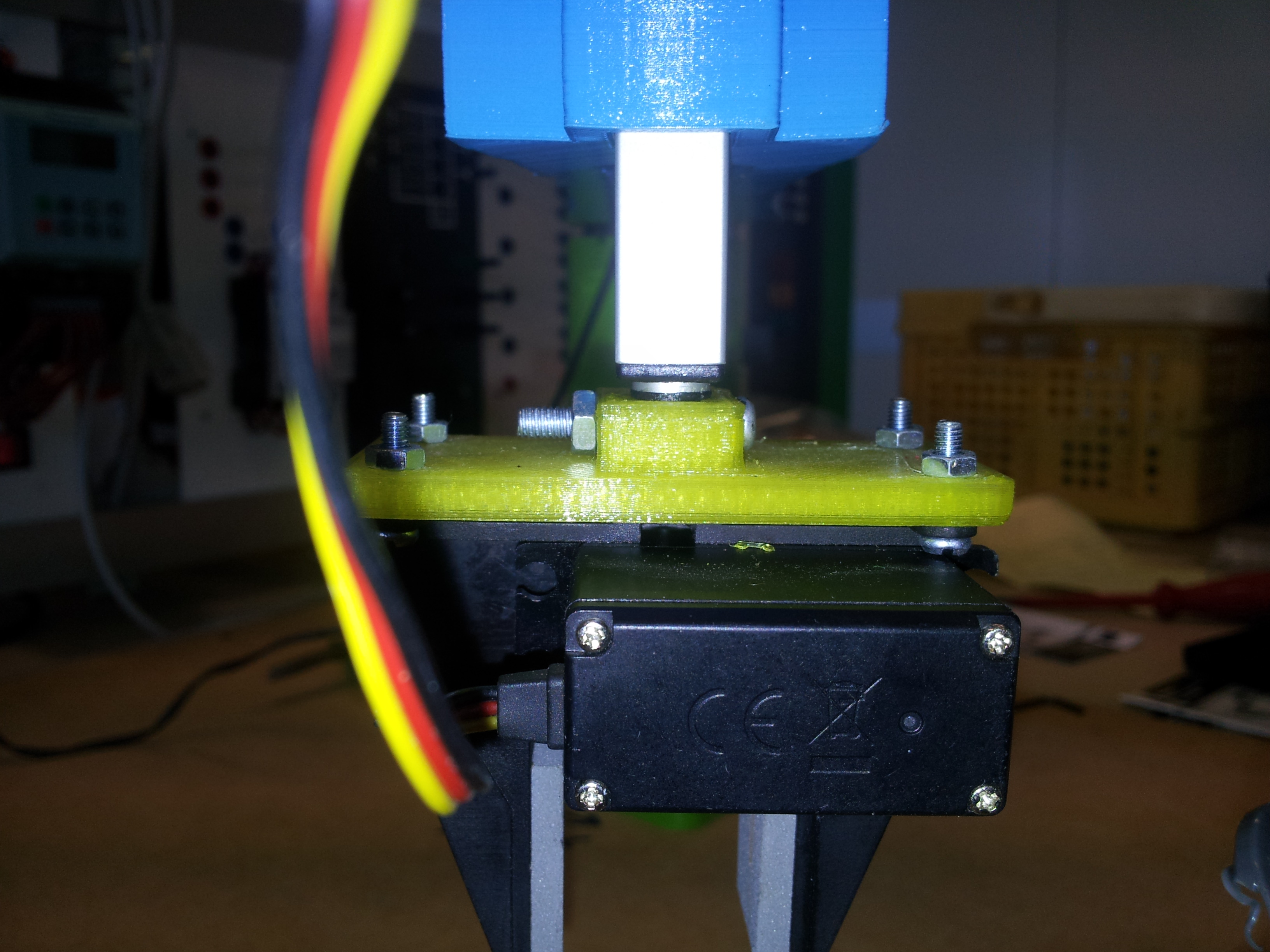
stap 6: detail van grijper
|
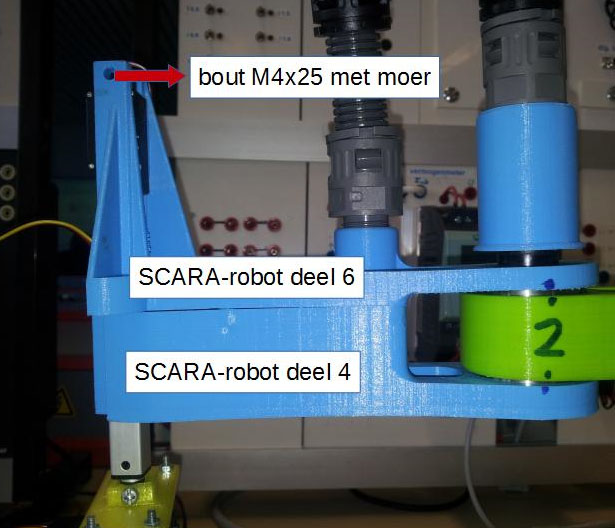
stap 7: koppelen van SCARA-robot deel 6 op SCARA-robot deel 4
|
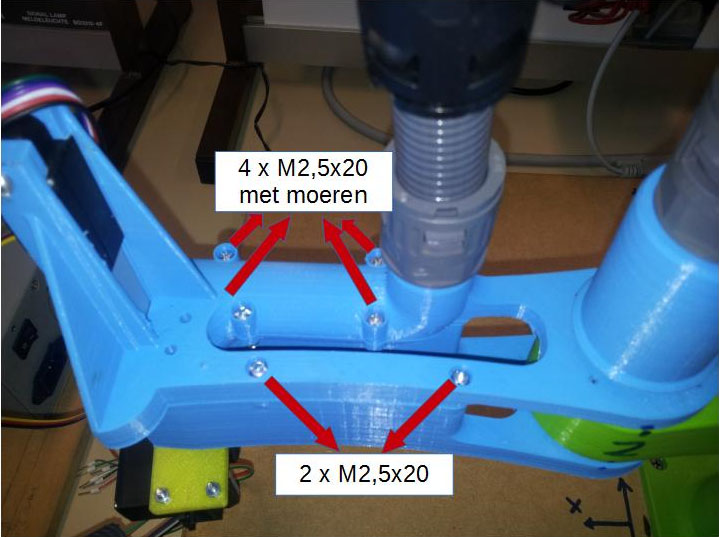
stap 7: koppelen van SCARA-robot deel 6 op SCARA-robot deel 4 (detail)
|
eindresultaat van de opbouw
2. het elektrisch ontwerp van de fysieke SCARA-robot
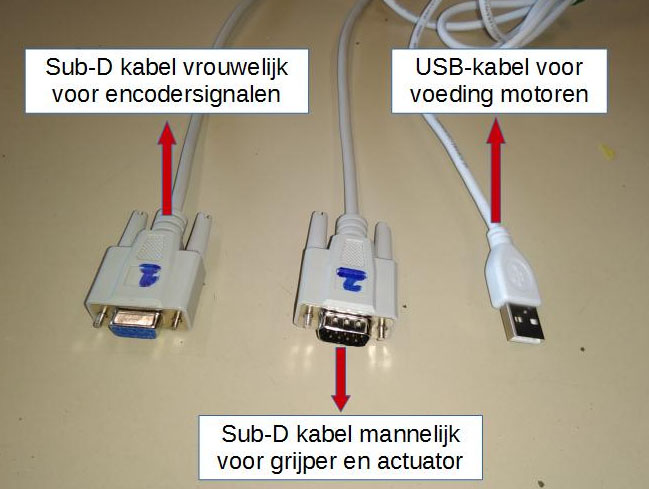
In dit deel wordt beschreven hoe de kabels van de elektrische onderdelen (in de fysieke SCARA-robot) naar buiten worden gebracht om te koppelen op de behuizing van het servosysteem. Hieronder volgt de opsomming van de kabels:
In dit deel wordt beschreven hoe de kabels van de elektrische onderdelen (in de fysieke SCARA-robot) naar buiten worden gebracht om te koppelen op de behuizing van het servosysteem. Hieronder volgt de opsomming van de kabels:
- de voedingskabels van de motoren in as 1 en 2 worden met een USB-verlengkabel naar buiten gebracht
- de encodersignalen van de motoren in as 1 en 2 worden met een mannelijk Sub-D kabel (9 pins) naar buiten gebracht (de maximale lengte is 2 meter om encoderverstoring te vermijden)
- de kabels van de lineaire actuator en de servomotor van de grijper worden met een vrouwelijke Sub-D kabel (9 pins) naar buiten gebracht (de maximale lengte is 2 meter om encoderverstoring te vermijden)
|
|
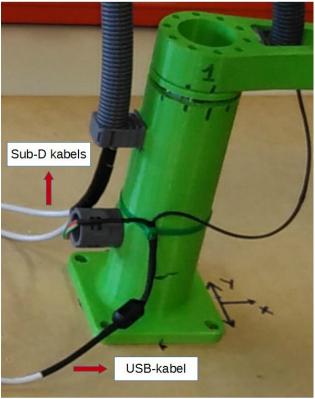
Het is dus de bedoeling dat je de kabels van de elektrische onderdelen verlengt via de USB- of Sub-D kabels. Welke kabels je op welke aansluitingen van de USB- of Sub-D kabel aansluit maakt hier niet uit. Wel zal je in de behuizing rekening moeten houden met de vaste bekabeling van de afstandsbediening van de SCARA-robot. In de map op google drive is een voorstel gedaan welke kabel van de elektrische onderdelen je op welke aansluiting van de USB- en Sub-D kabels verbindt. Dit is te vinden in het bestand "overzicht bekabeling" op google drive.
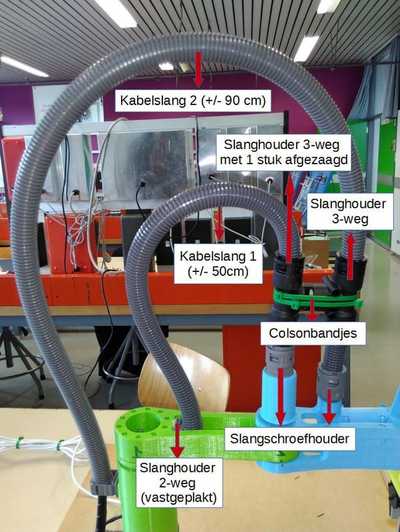
De kabels voor de encodersignalen van de motor in as 2, de grijper en de lineaire actuator moeten geleid worden via kabelslang 2. De voedingskabels van de motor in as 2 moeten geleid worden via kabelslang 1. De reden hiervoor is het vermijden van verstoring van de encodersignalen.
De encodersignalen van de motor in as 1 worden binnen gebracht in kabelslang 2 en daar verbonden met de vrouwelijke sub-D kabel.
Onderstaande foto's verduidelijken deze bekabeling.
De kabels voor de encodersignalen van de motor in as 2, de grijper en de lineaire actuator moeten geleid worden via kabelslang 2. De voedingskabels van de motor in as 2 moeten geleid worden via kabelslang 1. De reden hiervoor is het vermijden van verstoring van de encodersignalen.
De encodersignalen van de motor in as 1 worden binnen gebracht in kabelslang 2 en daar verbonden met de vrouwelijke sub-D kabel.
Onderstaande foto's verduidelijken deze bekabeling.
|

|
3. het elektrisch ontwerp van de afstandsbediening van de SCARA-robot
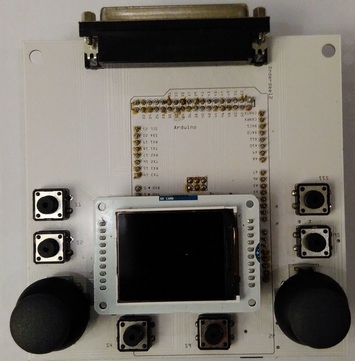
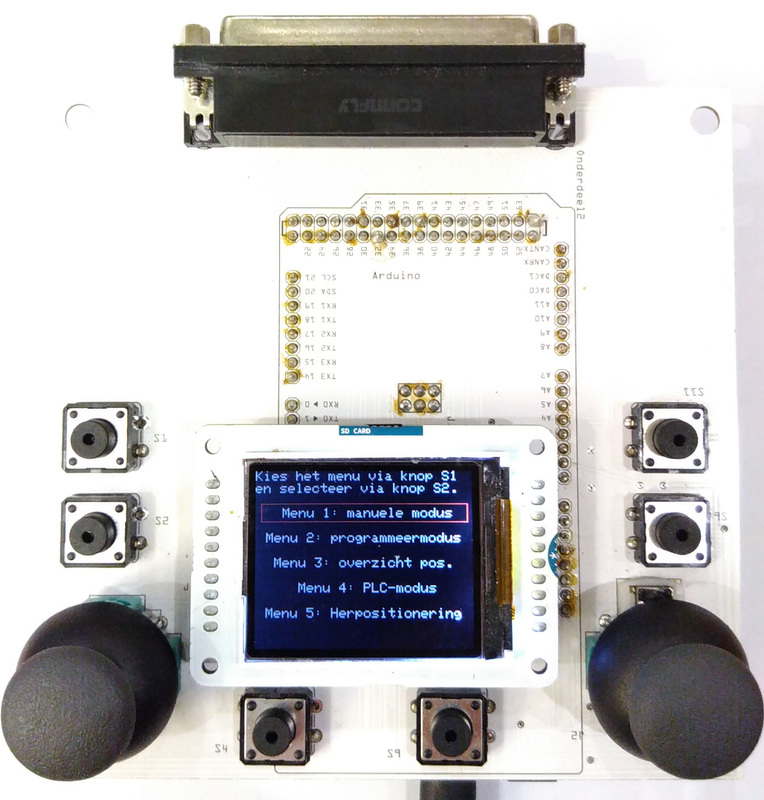
Zoals reeds gezegd is de afstandbediening gebouwd op een arduino due waar een eigen PCB voor is ontworpen. Hieronder is een foto van de afstandsbediening getoond alsook een video waarbij de SCARA-robot wordt aangestuurd met de twee joysticks.. Positionering kan tot op ongeveer 1 mm nauwkeurig worden uitgevoerd.
Zoals reeds gezegd is de afstandbediening gebouwd op een arduino due waar een eigen PCB voor is ontworpen. Hieronder is een foto van de afstandsbediening getoond alsook een video waarbij de SCARA-robot wordt aangestuurd met de twee joysticks.. Positionering kan tot op ongeveer 1 mm nauwkeurig worden uitgevoerd.
|
|
De onderdelen nodig voor deze afstandsbediening zijn weer te vinden in het bestand "onderdelenlijst" op google drive. Het bestand "afstandsbediening.fzz" in de map "afstandsbediening" op google drive kan gebruikt worden om de PCB te bestellen via de site van Fritzing. Uiteraard moeten alle onderdelen van de afstandbediening er nog op gesoldeerd worden.
De nodige arduino-bestanden zijn te vinden in de "arduino-bestanden" op google drive. Vergeet niet de bibliotheken op de juiste plaats te zetten in je arduino-mappen op je computer. Ook moeten de bestanden "LOG.CSV" en "scarbot.bmp" op de SD-kaart gekopieerd worden. Deze SD-kaart wordt geplaatst achteraan het scherm en wordt gebruikt om de posities op te slaan. Formateer de SD-kaart met FAT32 en kopieer de bestanden in de rootdirectory van de SD-kaart.
De nodige arduino-bestanden zijn te vinden in de "arduino-bestanden" op google drive. Vergeet niet de bibliotheken op de juiste plaats te zetten in je arduino-mappen op je computer. Ook moeten de bestanden "LOG.CSV" en "scarbot.bmp" op de SD-kaart gekopieerd worden. Deze SD-kaart wordt geplaatst achteraan het scherm en wordt gebruikt om de posities op te slaan. Formateer de SD-kaart met FAT32 en kopieer de bestanden in de rootdirectory van de SD-kaart.
|
Rechts is de afstandsbediening te zien met alle onderdelen gesoldeerd op de PCB. Deze onderdelen zijn:
|
|
De werking van de afstandsbediening zou duidelijk moeten zijn op basis van de tekst in de menu's en op basis van het arduino-programma zelf. Indien je echter verduidelijking nodig hebt mag je mij altijd contacteren via de pagina "contact".
Het sturen van posities vanuit een PLC gebeurt op basis van digitale 3.3V signalen waarbij de posities binair worden doorgegeven. De 3.3V wordt aangeleverd door de arduino due zelf. Ook stuurt de arduino een 3,3V signaal terug naar de PLC om te laten weten of de positie bereikt is.
Het sturen van posities vanuit een PLC gebeurt op basis van digitale 3.3V signalen waarbij de posities binair worden doorgegeven. De 3.3V wordt aangeleverd door de arduino due zelf. Ook stuurt de arduino een 3,3V signaal terug naar de PLC om te laten weten of de positie bereikt is.
4. de beschrijving en behuizing van het servosysteem van de SCARA-robot
Hieronder is de behuizing van het servosysteem van de SCARA-robot te zien.
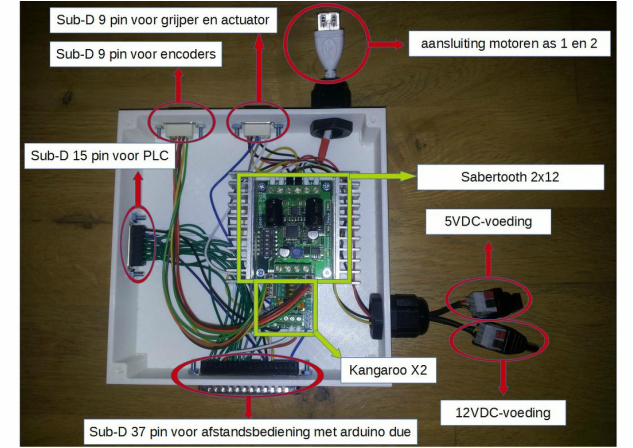
De behuizing is 3D-geprint en de bestanden hier voor zijn "behuizing.stl" en "deksel.stl" in de map "STL-bestanden behuizing" op google drive. Wie liever de bestanden in ipt-formaat wenst kan mij altijd contacteren op de pagina "contact".
Hoe de kabels en onderdelen worden verbonden is terug te vinden in het bestand "overzicht bekabeling" op google drive.
Hoe de kabels en onderdelen worden verbonden is terug te vinden in het bestand "overzicht bekabeling" op google drive.
5. instellen van het servosysteem voor as 1 en 2
As 3 (de lineaire actuator) en as 4 (de grijper) dienen niet ingesteld daar deze niet worden aangestuurd door het servosysteem (de kangaroo samen met de sabertooth 2x12).
Maar as 1 en 2 worden wel aangestuurd door het servosysteem. Dit servosysteem is een zelflerend servosysteem en kan je zelf instellen. Dit wordt beschreven op de site van Dimension Engineering. Meer informatie hoe dit te doen kan hier gevonden worden.
Er zijn echter wat details die moeilijk te beschrijven zijn. Het is makkelijker om het servosysteem aan te sluiten op je computer en het bestand "instelling servosysteem.tooth" te uploaden. Dit bestand is te vinden onder de map "instelling servosysteem" op google drive. Hier is meer informatie te vinden hoe je dit uitvoert.
Belangrijk om op te merken is dat het servosysteem in deze uitvoering zichzelf niet kan homen. Voor je de SCARA-robot opzet moet je as 1 en as 2 plaatsen zoals hieronder getoond. Deze positie zal dan overeenkomen met een XY-startpositie van (300mm, 0mm). Best kan je deze posities van as 1 en 2 aanduiden met een alcoholstift.
Maar as 1 en 2 worden wel aangestuurd door het servosysteem. Dit servosysteem is een zelflerend servosysteem en kan je zelf instellen. Dit wordt beschreven op de site van Dimension Engineering. Meer informatie hoe dit te doen kan hier gevonden worden.
Er zijn echter wat details die moeilijk te beschrijven zijn. Het is makkelijker om het servosysteem aan te sluiten op je computer en het bestand "instelling servosysteem.tooth" te uploaden. Dit bestand is te vinden onder de map "instelling servosysteem" op google drive. Hier is meer informatie te vinden hoe je dit uitvoert.
Belangrijk om op te merken is dat het servosysteem in deze uitvoering zichzelf niet kan homen. Voor je de SCARA-robot opzet moet je as 1 en as 2 plaatsen zoals hieronder getoond. Deze positie zal dan overeenkomen met een XY-startpositie van (300mm, 0mm). Best kan je deze posities van as 1 en 2 aanduiden met een alcoholstift.
|

|
|
6. Mogelijke oplossing voor encoderverstoring
Indien je de USB-kabel die de motoren voedt niet langs de Sub-D kabel legt dan zullen de encodersignalen niet verstoord worden. Indien verstoring toch optreedt en as 1 en as 2 zich niet kunnen positioneren kunnen ferrietkernen een oplossing bieden. Hieronder is een ferrietkern getoond. Je kan aan het begin en aan het einde van de USB-kabel zo een ferrietkern plaatsen. Deze kosten een paar euro en zijn te verkrijgen in elke elektronicazaak.

|

|

|
