project: ontwerp van een simpele robotarm
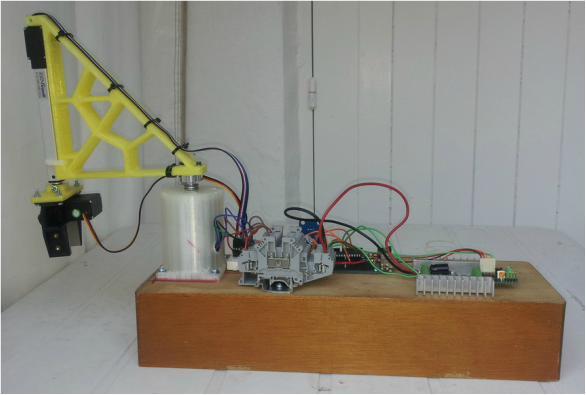
In dit project is een kleine robotarm ontworpen voor pick-and-place oefeningen. Hieronder is een foto alsook een video van de robotarm te vinden.
|
|
In de video wordt getoond hoe de robotarm kan roteren en de grijper verticaal kan verplaatst worden. Via twee drukknoppen kan de grijper geopend en gesloten worden.
De motor die voor rotatie zorgt is een DC-motor met encoder aangedreven door een servosysteem zoals gebruikt in het project "lineaire positionering met een DC-motor met encoder". In dit geval draait de robot 180° maar dit kan makkelijk aangepast worden tot elke gewenste draaihoek. De positie wordt bepaald door een draaiweerstand maar kan ook bepaald worden door een analoge spanning van 0VDC tot 5VDC.
De verticale beweging wordt verzorgd door een lineaire actuator. Deze actuator kan maximaal 10 cm uitschuiven en de grootte van de uitschuiving wordt bepaald door een draaiweerstand. Ook hier kan dit bepaald worden door een analoge spanning van 0VDC tot 5VDC. Eventueel is er ook positiefeedback beschikbaar via analoge spanning van 0VDC tot 3,3VDC.
De grijper wordt aangestuurd via een kleine servomotor die is aangesloten op een arduino uno. In dit geval bepalen twee drukknoppen de stand: open of gesloten. De grijper kan echter ook aangestuurd worden door een analoge spanning van 0VDC tot 5VDC zodat elke grijperstand kan bepaald worden.
Dit project kan gebruikt worden in de eerste graad secundair onderwijs waarbij de aansturing gebeurt door middel van draaiweerstanden en drukknoppen. In de tweede graad kan men de overstap maken naar het aansturen van de robotarm via analoge PLC-signalen. In de derde graad kan men eventueel serieel communiceren met het servosysteem en op die manier alle mogelijkheden van de robotarm gebruiken.
Een concrete toepassing van deze robotarm zou een pick-and-place toepassing zijn waarbij de robot voorwerpen zou kunnen sorteren.
De kostprijs van het project is ongeveer 312 euro.
Hieronder is een link voorzien naar google drive-map waar het volgende te vinden is:
In de onderdelenlijst is het houten plankje niet opgenomen. Onderdelen waar geen link bij staat hebben een geschatte prijs. Schroeven, bouten bekabelingsmateriaal moeten wel nog ingerekend worden.
De motor die voor rotatie zorgt is een DC-motor met encoder aangedreven door een servosysteem zoals gebruikt in het project "lineaire positionering met een DC-motor met encoder". In dit geval draait de robot 180° maar dit kan makkelijk aangepast worden tot elke gewenste draaihoek. De positie wordt bepaald door een draaiweerstand maar kan ook bepaald worden door een analoge spanning van 0VDC tot 5VDC.
De verticale beweging wordt verzorgd door een lineaire actuator. Deze actuator kan maximaal 10 cm uitschuiven en de grootte van de uitschuiving wordt bepaald door een draaiweerstand. Ook hier kan dit bepaald worden door een analoge spanning van 0VDC tot 5VDC. Eventueel is er ook positiefeedback beschikbaar via analoge spanning van 0VDC tot 3,3VDC.
De grijper wordt aangestuurd via een kleine servomotor die is aangesloten op een arduino uno. In dit geval bepalen twee drukknoppen de stand: open of gesloten. De grijper kan echter ook aangestuurd worden door een analoge spanning van 0VDC tot 5VDC zodat elke grijperstand kan bepaald worden.
Dit project kan gebruikt worden in de eerste graad secundair onderwijs waarbij de aansturing gebeurt door middel van draaiweerstanden en drukknoppen. In de tweede graad kan men de overstap maken naar het aansturen van de robotarm via analoge PLC-signalen. In de derde graad kan men eventueel serieel communiceren met het servosysteem en op die manier alle mogelijkheden van de robotarm gebruiken.
Een concrete toepassing van deze robotarm zou een pick-and-place toepassing zijn waarbij de robot voorwerpen zou kunnen sorteren.
De kostprijs van het project is ongeveer 312 euro.
Hieronder is een link voorzien naar google drive-map waar het volgende te vinden is:
- een onderdelenlijst met prijs en mogelijke aankoopplaats.
- STL-bestanden voor de 3D-geprinte onderdelen
- het programma voor de arduino uno "grijperprogramma.ino"
In de onderdelenlijst is het houten plankje niet opgenomen. Onderdelen waar geen link bij staat hebben een geschatte prijs. Schroeven, bouten bekabelingsmateriaal moeten wel nog ingerekend worden.
